
We kicked off 2017 with our first farm visit for the year at the 1300ha Holstons Station near Buchan in east Gippsland, Victoria, Australia.
The brief is to design build a complete Keyline® landscape using the #RegrariansPlatform.
We tested the new DJI #MavicPro — both for getting a bird’s eye view of the site + to time test it for checking livestock and water troughs. The #MavicPro will fly approximately 4.5km from its controller and so could be an option for saving graziers a lot of time (and money & fuel) doing routine inspections.
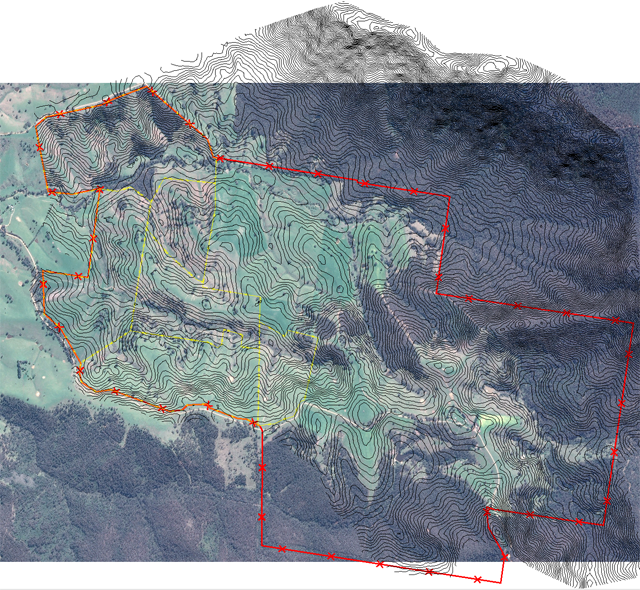
Fig. 1 – GoogleEarth® photo mosaic with 5m vertical elevation contours (black), boundary (red) and some of the existing fences (yellow) marked. We used the Mac app. ‘Grab’ to screenshot a number of higher resolution images of the available satellite data. We then used the ‘Photomerge’ tool in PhotoShop® Elements® to stitch these images together. We find that this will typically give us a much better quality image than if we just use the ‘Save Image’ function in GoogleEarth — especially for larger properties.

Fig. 2 – Aerial view (west) of one of the main ridges at Holstons Station.

Fig. 3 – ‘Mavical’ flying object hovering above us!

Fig. 4 – Aerial view (south east) of the #SecondaryValleys at Holstons Station which has the highest potential for #Keyline #FloodFlow irrigation.

Fig. 5 – Aerial view of the upper reaches of the same #SecondaryValley as shown in Fig. 4. The highest #Keypoint in the highest #PrimaryValley is at 10 o’clock as you go up the valley floor and its branching.

Fig. 6 – Aerial view of a trough from about 40m elevation — this was part of a trial flight to ascertain the efficacy of using consumable UAV’s for graziers in checking important elements like water troughs.

Fig. 7 – Aerial view of the same trough from about 10m elevation.

Fig. 8 – Aerial view from about 90m elevation of an empty trough. This height appears to be sufficient for checking whether or not trough’s are full or empty. Having a consistent altitude on a UAV as it traverses along its flight path reduces the time taken in descent/ascent and the total flying time per battery.